About Me
Hello! I'm Saumil Jain, a huge automotive enthusiast who loves working on Electric Powertrains. Currently, I'm pursuing my master's in Automotive Engineering at Clemson University, where I'm also interning at Deep Orange, Clemson University's vehicle prototyping program. Here, I'm responsible for developing a series hybrid powertrain for a high-speed rescue vehicle.
I completed my undergraduate studies at Pune University in India, where I was actively involved in FSAE. With my team, I competed in multiple events nationally and internationally and successfully led the transition from a combustion to an electric team.
I created this website to showcase my projects. Please scroll down and feel free to reach out to me if you have any suggestions or would like to collaborate.
 Github Projects
Github ProjectsDeveloping a Series Hybrid Powertrain from scratch
Deep Orange is a 2-year educational design process, where an industrial sponsor provides a real-world problem to the students. Deep Orange 15 is a high-speed off-road autonomous rescue vehicle, loosely based on a King of the Hammer racecar. Our sponsor is looking into the electrification of their fleet, and hence a significant deliverable is to come up with more efficient powertrains.
The challenge is to find a powertrain solution that is robust in austere environments, to come up with requirements that fit the goals of our sponsor, and to fulfill them. The motorsport element also makes the control of the powertrain very challenging.
In the forthcoming slides, you will see the development of DO15's powertrain: why we chose a series hybrid, how we sized our components, how we developed the powertrain controller, and lastly how we tested it against the requirements.
Comparing Hybrid Options over a Drivecycle
There are different hybrid options available. However, based on our requirements of stationary power export and electric-only modes, the possible solutions were a P2 hybrid or a Series Hybrid. Using available GPS data of King Of The Hammer race tracks, a drive cycle was developed.
Using the drive cycle data, we ran simulations comparing the series hybrid with a P2 parallel hybrid. In series hybrids, the mechanically decoupled nature means that regardless of the wheel RPM, the engine can charge the battery at desired power levels. This was evident in the drive cycle simulations where high power draws occurred; the parallel hybrid would have a completely discharged battery and hence would run in a 'derated' state.
This ability of the series hybrid meant that it would provide better performance, even with conversion losses. Therefore, it was chosen as the best solution for our use case.
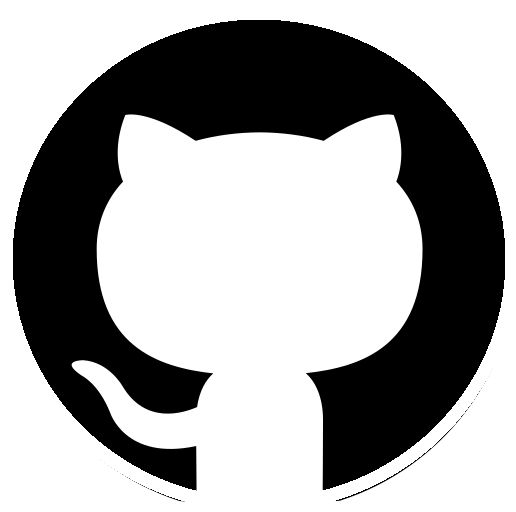
Sizing Components to Minimize Lap Time
The next important step was to select the motors, generators, engine, and battery pack. The benefit of a hybrid powertrain in a power application will only be significant if the engine acts as an energy-dense source and the battery acts as a power-dense source. Since the battery is a buffer, we want it to be adequately sized such that we never derate during the drive cycle. Based on the requirements, derates, and mass, we were able to zero in on a battery capacity and engine power.
Since different components will have different specifications we developed a lap time simulator that, based on the specifications, gave a redefined drive cycle (speed vs. time).Using data-based modeling methods, we developed a powertrain model. This helped us to analyze the fuel consumption for a certain powertrain combination. In the end, we ran 40 different simulations to finalize our powertrain component selection.
- Engine: Cummins R2.8L
- Generators: YASA P400RHC
- Motors: YASA P400RHC
- Inverters: Cascadia CM200
- Battery: 20 kWh 11C Discharge
We have also selected a (400V>12V)DC/DC converter, DC/AC converter for export and charging functions.
Building a Powertrain Controller
With 19 components to control in total, and 11 members working in the powertrain team, the control software architecture has to be very standardised so that all the software owners develop something that is cohesive.
The template architecture was developed in a manner that simplifies going from SIL to HIL. Just by replacing the Input,Param and Output blocks, we run the code on Simulink itself. This helps us to iron out software bugs very early and saves the time of compiling and flashing.
An example template of the Energy Management subystem is shown and at the end a summary of the control strategy is shown. The vehicle software has 14 such subsystem libraries. All signals of the subsystems are published on a matlab bus object and hence available to all inddividual subsystems.
Matlab's code generation was used to compile code that was then flashed onto a Rapid Control Prototyping module called raptor provided by New Eagle.
Hardware in Loop Testing
As our components start to come in, we are currently in the process of setting up low level controllers and testing them using New Eagle's Rapid Prototyping product suite. In this GIF you can see using Raptor Cal we are spoofing the throttle using a poorman's DAC,i.e a RC low pass filter on a PWM signal. We are reading the engine speed that is published on the CAN bus. Now the next steps are to assemble the generators and battery and to test our energy management strategy. Stay Tuned!
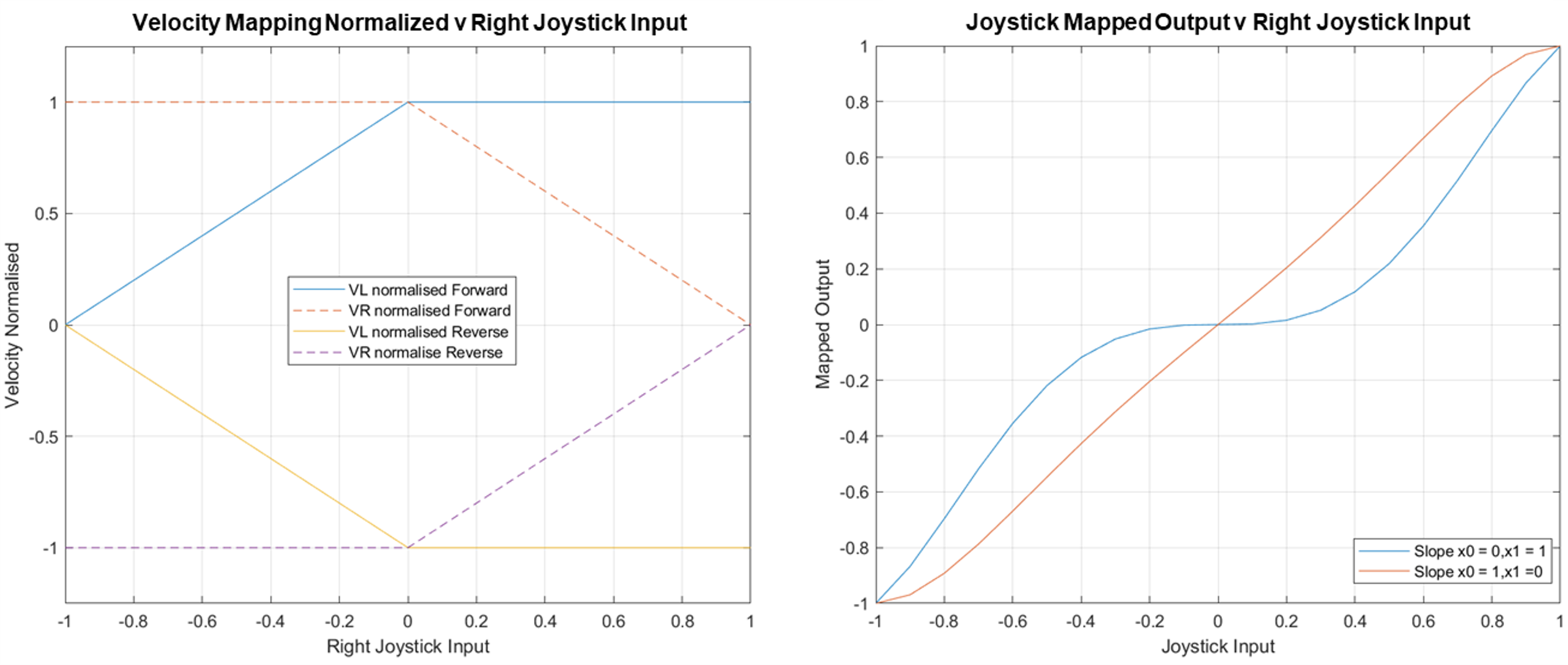
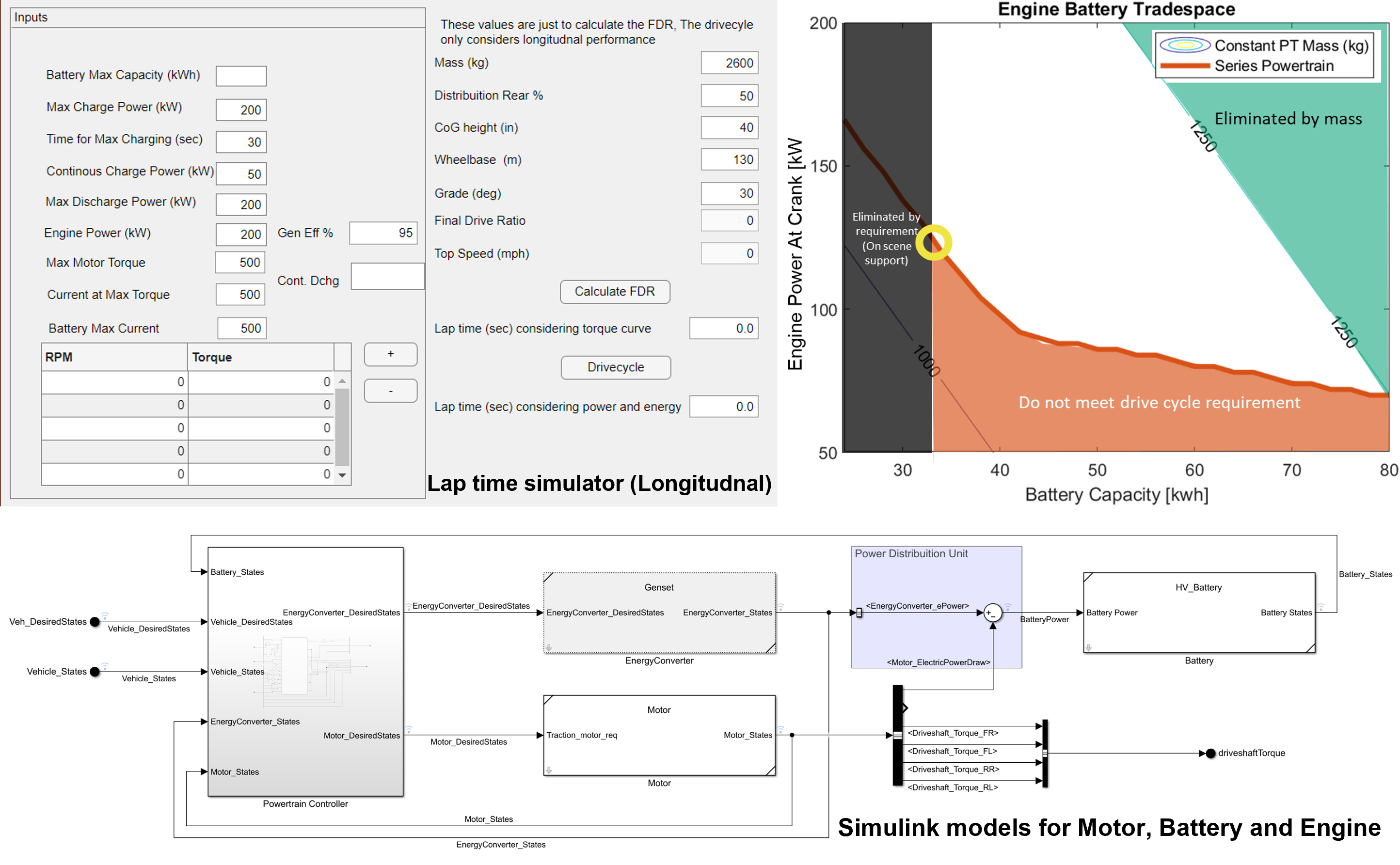
Safe Mode Motion Controller for a Tracked Vehicle
Working under the VIPR-GS research group at Clemson University, I was tasked with creating a motion controller that allows for precise control in lateral and longitudnal direction.
To achieve this, a sensitivity gain was added to the joystick inputs. The inputs were then converted into left and right track velocities. This was transformed into longitudnal velocity and yaw rate which was then fed into a PID controller after rate limiting.
In order to achieve fast response times we made use of a feedforward with a sigmoid function to overcome stiction at zero velocities.
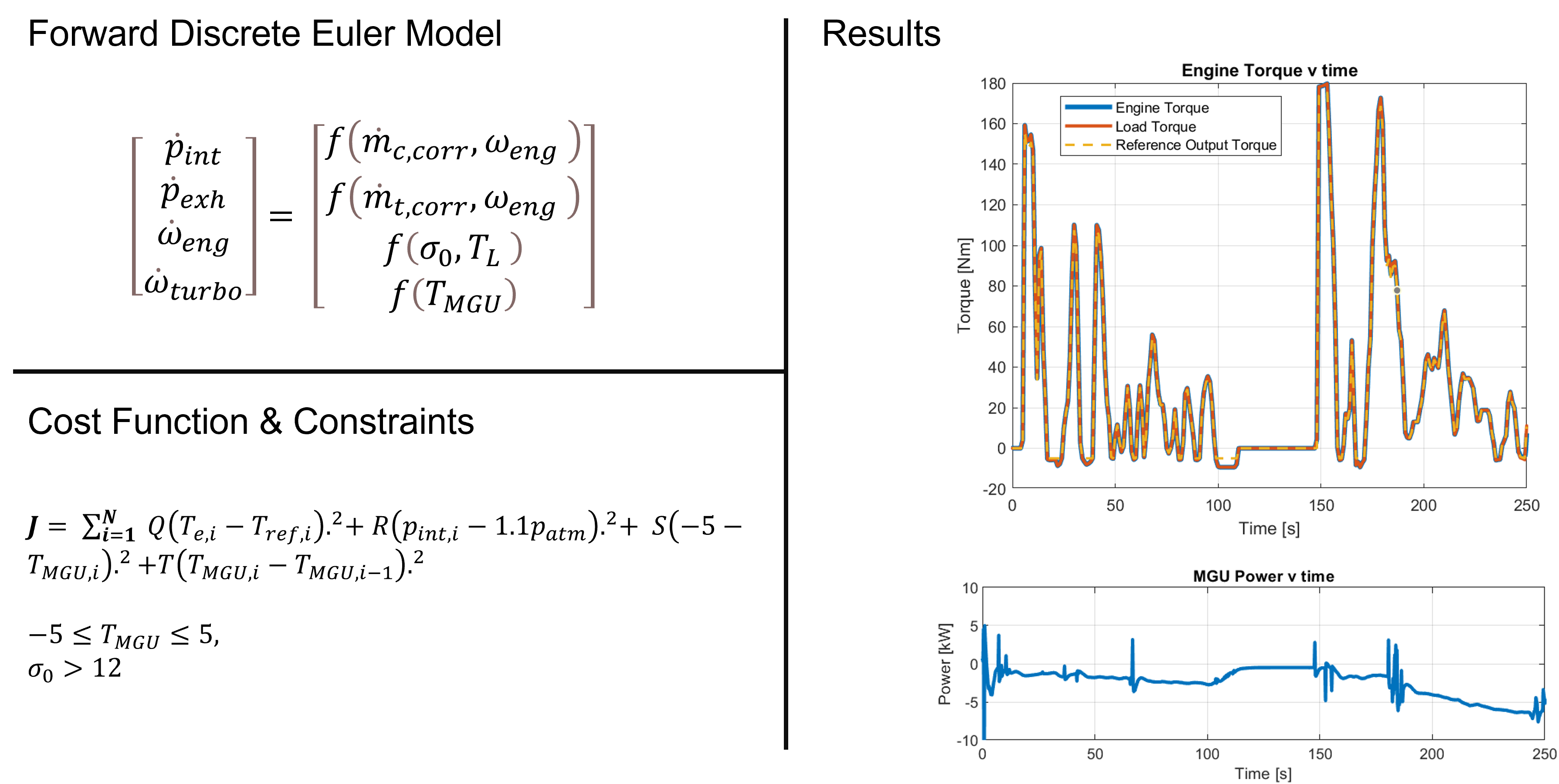
Model Predictive Controller for an Electrically Assisted Turbocharger
As part of a collaborative group project focused on optimizing engine performance, we developed a model predictive controller using Simulink. Our approach involved creating a simple forward Euler model to accurately describe the behavior of a turbocharged engine. Additionally, we integrated a motor torque add/subtract feature on the turbocharger shaft, leveraging the assumption that the electric motor's dynamics are significantly faster than the air path dynamics.
Subsequently, we rigorously tested this controller using MATLAB's reference Simulink vehicle model and achieved satisfactory results. Our utilization of the forward discrete Euler method played a pivotal role in reducing the time required to find an optimized solution, enhancing efficiency and effectiveness.
During our optimization process, we encountered challenges such as local minima when using MATLAB's fmincon function. To address this issue, we implemented a particle swarm search prior to initiating the fmincon algorithm. This additional step proved instrumental in mitigating the occurrence of local minima and improving the overall optimization process.
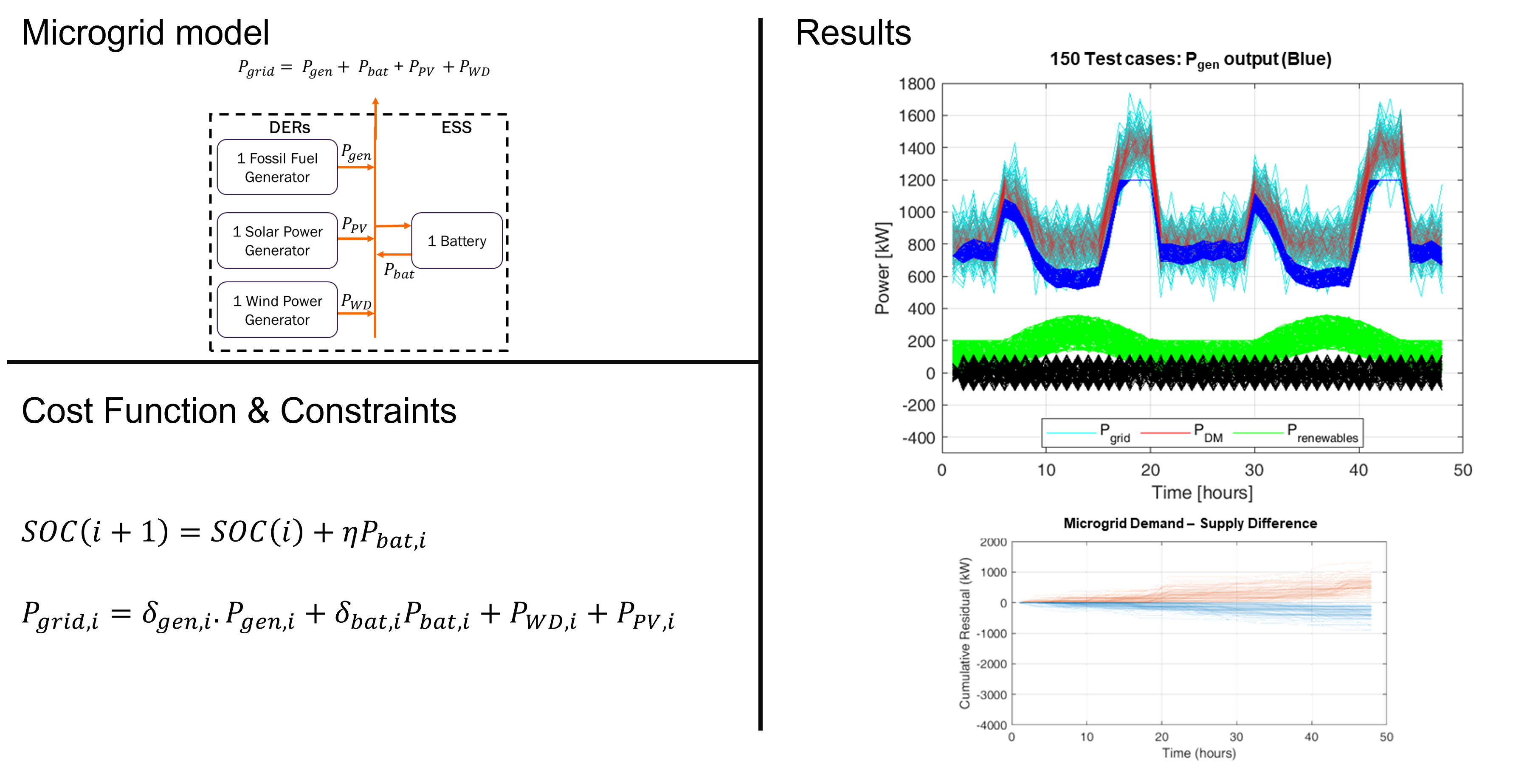
Microgrid Planning Under Uncertainties Using Scenario MPC
Microgrids have shown promise to curb disturbances to the main power grid or allow smaller hard communities to operate islanded from the main grid, thereby increasing the quality of life for the inhabitants. However, control of the microgrid has proven to be a challenging task in either scenario. Due to their much smaller inertia, microgrids are much more susceptible to power fluctuations within the grid. This has not stopped people from trying to develop controllers that can still operate these grids in an optimal manner.
In this work, we present a scenario-based stochastic model predictive control algorithm to plan the grid operating set points over a 24-hour window. Our model guarantees constraint satisfaction with a probability of 70%. This limitation is attributed to time and computational constraints and could potentially be improved with more powerful computing resources. Additionally, we demonstrate that by simply tuning two parameters in the cost function, we can shift the grid from net deficit to net surplus for the case of an islanded grid with no fallback supply.
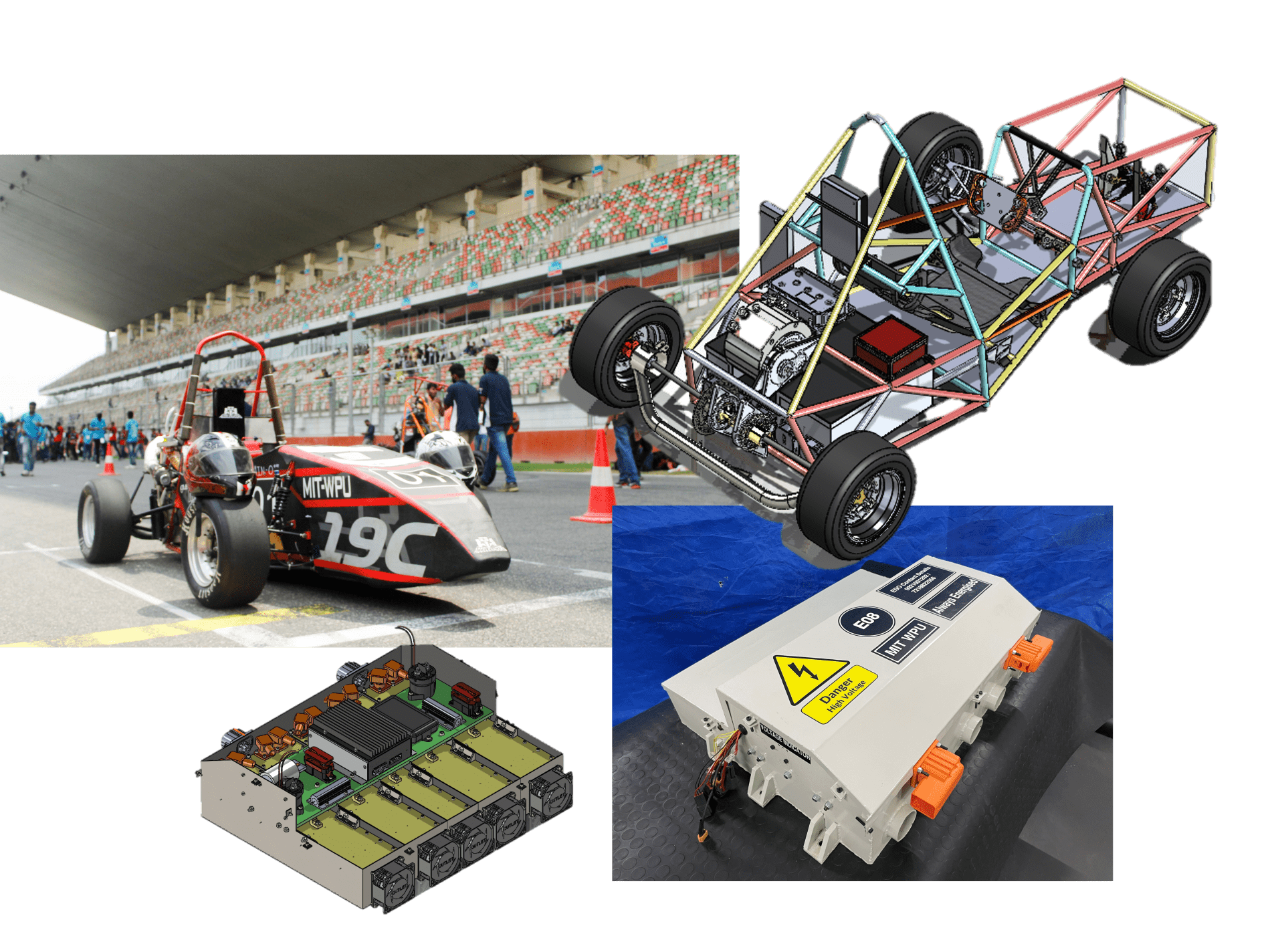
Formula SAE
Being a huge motorsports enthusiast and looking to learn more about how to be a powertrain engineer, I quickly jumped on the opportunity of joining my university's Formula SAE (FSAE) team in my junior (first) year of undergraduate studies. My work ethic was hugely influenced by FSAE, and working with people who share the same passion and a huge amount of knowledge was a brilliant experience for me.
During my senior year, I led the team to switch to an electric powertrain. Along with the team, I developed the entire electric powertrain. We had to learn everything about high-voltage systems and their safety, as well as the different components required to have a working electric traction system.
One major discussion point involved deciding between a 100V or 400V architecture. We stuck with a 100V architecture because of the availability of components and the lower cost.
We had to build our own battery pack. We chose Samsung 30Q cells because of their power and energy density. Since we were new to the electric competition context, we decided to go with the Orion BMS2.